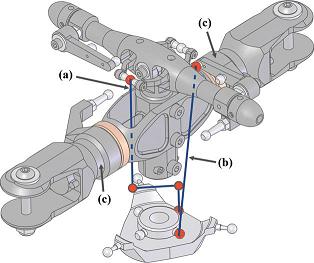
To carry out surgical operations in the nasal cavity, a surgeon needs to use one hand to hold and control an endoscope that views the nasal cavity and the other hand to manipulate surgical tools. In this project, we propose to develop a robot manipulator to hold and control the endoscope so that the surgeon can use both his/her hands to perform the operational procedure, which is highly preferable. The robot manipulator consists of a positioning device, which is to be manually set up before the operation, and a compact dexterous endoscope holder with fine motion and force control, which is to be controlled by the surgeon. The dexterous endoscope holder will have five degrees of freedom that are specially designed so as to realize fine motion of the endoscope inside the narrow nasal cavity. The operational safety of the proposed robotic system is guaranteed by a passive safety mechanism and an active force controller. The hand-busy surgeon controls motion of the endoscope by a friendly force-reflecting foot-controlled or voice-controlled interface, which enables the surgeon to feel or understand the interaction forces of the endoscope with the nasal cavity. To guarantee stability of the system, we will develop a sensor-based motion planner that maps the surgeons motion commands to the motion of the endoscope based on the compliance of tissues in the nasal cavity, which is estimated on-line using the force and position measurements. The performance of the robotic endoscope holder will be verified by experiments. The results will advance research of robotics technology for nasal surgery and have direct applications for medical services in Hong Kong.
An active sensor network consists of a number of sensor nodes
mounted on spatially distributed mobile agents. Each sensor node is
capable for sensing, computation, data storage and data exchange via
wireless network. Mobility enables sensor network a better coverage of
the environment, a faster response to changes and a flexible network
formation. In this project, our objectives are to:
develop autonomous deployment algorithms for sensing coverage
maximization
apply active sensor networks on target tracking under energy saving
consideration
apply active sensor networks on environment monitoring and
surveillance
Active Sensor Network Deployment
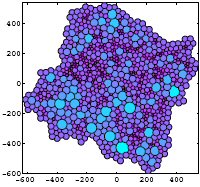
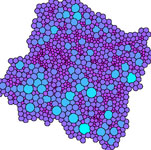
A number of novel and efficient autonomous algorithms for deploying an
active sensor network have been developed. These algorithms can
effectively maximize or enlarge area covered by sensor nodes while
preserving network connectivity, ensuring collision-free motions and
avoiding obstacles. Distributed computation approaches are adopted,
therefore the algorithms are efficient and scalable.
Applications of Active Sensor Networks
Energy saving target tracking using active sensor networks:
The problem of mobile target tracking using a mobile sensor network is
considered. We are investigating algorithms for minimizing energy
consumption and maintaining network connectivity.
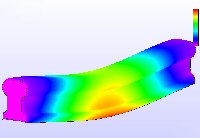
Seamless railway temperature stress examination: The rails in
seamless lines bear higher temperature stress than those in
conventional ones due to the significant length differences. A
wireless sensor network of piezoelectricity sensors is employed to
measure the deformed shape of seamless lines and estimate the
temperature stress. This is an important application in safety
monitoring of railway.
Funding Sources:
RGC Earmarked Grant (PI: Prof. Yun-Hui Liu): "Modeling and control of mobile robots
for active sensor networks", HK$359,224, 2005-2006.
People Involved:
Prof. Yun-Hui Liu, Miss Cherry Miu-Ling Lam, Miss Ying-Ying Li and Mr.
Lin Wang
Publications:
Miu-ling Lam and Yun-hui Liu, “Sensor Network Deployment using
Circle Packings”, accepted in 2007 IEEE International Conference on
Robotics and Automation (ICRA2007).
Ying-Ying Li and Yun-hui Liu, "Energy Saving Target Tracking
Using Mobile Sensor Networks", accepted in 2007 IEEE International
Conference on Robotics and Automation (ICRA2007).
Miu-ling Lam and Yun-hui Liu, “Heterogeneous Sensor Network
Deployment using Circle Packings”, to appear in The International
Conference on Information Networking (ICOIN2007).
Miu-ling Lam and Yun-hui Liu, “Active Sensor Network Deployment
and Coverage Enhancement using Circle Packings”, in Proceedings of
2006 IEEE International Conference on Robotics and Biomimetics (ROBIO
2006), pp 520 – 525.
Miu-ling Lam and Yun-hui Liu, “ISOGRID: an Efficient Algorithm
for Coverage Enhancement in Mobile Sensor Networks”, in Proceedings
of 2006 IEEE/RSJ International Conference on Intelligent Robots and
Systems (IROS 2006), pp. 1458 - 1463.
Ying-Ying Li, W.H. Fan, Yun-hui Liu and X.P. Cai, “Teleoperation
of robots via the mobile communication networks”, in Proc. of IEEE
Int. Conf. on Robotics and Biomimetics, pp. 670-675, 2005.
With a proven record of successful autonomous flights, we have been developing avionics, including real-time control and sensing system, and light-weighted embedded vision system for the unmanned aerial robots since 2007.
To face the tangible and unparallel treats to the vulnerable Global Navigation Satellite System (GNSS) on the unmanned helicopters, we developed a robust estimator against the GNSS outage by integrating the jam-free and all-weather inertial sensors with a series of novel measures. This ground-breaking technology enables our aerial agents to localize themselves even when the GNSS experiences a total blackout.
For the dynamic modeling of the commonly used hingeless helicopters, we as well addressed the notorious cross-coupling responses on this kind of helicopter by using gyroscopic effect. Our analysis lays a foundation for the analysis in the field of the hingeless helicopters, and yields a solid theoretical foundation for the future development of nonlinear flight controllers for this kind of aerial agents.
Visual servoing is an approach to control motion of a
robot manipulator using visual feedback signals from a vision system.
The range of this project covers both eye-to-hand and eye-in-hand
configuration. This project focus in uncalibrated environments, that is,
assume that the intrinsic parameters of the camera and the extrinsic
parameters, i.e. the homogeneous transform matrix between the camera and
the robot, are unknown.
We developed the first complete solution to the
difficult problem of 3-D un-calibrated visual servoing with nonlinear
robot dynamics. In the project, an important concept called
depth-independent image Jacobian is proposed to eliminate the nonlinear
scaling effect of the depths of the image features. By using the
depth-independent image Jacobian instead of the ordinary image Jacobian,
it is possible to linearly parameterize the closed loop dynamics of the
system by the unknown parameters so that an adaptive algorithm can be
developed. The stability of the system and asymptotic convergence of the
image errors under the control of our controller has been proved
theoretically and demonstrated by experiments.
Funding Sources:
Hong Kong RGC Grant CUHK4167/03E and 414406
NSFC Projects 60334010 and 60475029
People Involved:
Prof. Yun-Hui Liu, Mr. Hesheng Wang and Mr. Kin-Kwan Lam
Publications:
H. Wang and Y. H. Liu, “Uncalibrated Dynamic Visual
Tracking of Manipulators,” accepted by Proc. of IEEE International
Conference on Robotics and Automation, 2007.
H. Wang, Y. H. Liu and D.
Zhou, “Dynamic visual tracking for manipulators using an uncalibrated
fixed camera,” accepted by IEEE Trans. on Robotics, 2007.
Y. H. Liu and H. Wang, “Adaptive visual servoing
of robot manipulators”, a book chapter of Advance Robot Control:
From Everyday Physics to Human Movements, pp. 55-82, 2006. Springer.
H. Wang, and Y. H. Liu, “Adaptive Visual Servoing of Robot
Manipulators Using Uncalibrated Eye-in-hand Visual Feedback”,
Proceedings of IEEE International Conference on Robotics and
Biomimetics, pp.386-391, 2006.
H. Wang and Y. H. Liu, "Dynamic Visual Servoing of Robots Using
Uncalibrated Eye-in-hand Visual Feedback," Proc. of IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.3797-3802, 2006.
H. Wang and Y. H. Liu, “Uncalibrated Visual Tracking Control without
Visual Velocity,” Proc. of IEEE International Conference on Robotics
and Automation, PP.2738-2743, 2006.
Y. H. Liu, H. Wang and D. Zhou, “Dynamic Tracking of Manipulators
Using Visual Feedback from a Uncalibrated Fixed Camera,” Proc. of
IEEE International Conference on Robotics and Automation,
pp.4124-4129, 2006.
Y. H. Liu, H. Wang, C. Wang and K. Lam, “Uncalibrated Visual
Servoing of Robots Using a Depth-Independent Image Jacobian Matrix,”
IEEE Transactions on Robotics, Vol. 22, No. 4, August 2006.
Y. H. Liu, H. Wang, W. Fan and X. Cai, “A New Adaptive Controller
for Robots Using Uncalibrated Eye-in-Hand Visual Feedback,” Proc. of
IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp. 2670-2675, 2005.
Y. H. Liu, H. Wang and K. Lam, “Dynamic visual servoing of robots in
uncalibrated environments,” Proc. of IEEE International Conference
on Robotics and Automation, pp.3142-3147, 2005.
Human-robot interactions (HRI) are becoming increasingly important,
which is clearly demonstrated by the growing integration of computer
controlled mechanical systems into everyday life and various industrial
applications. Our research in HRI concentrates on the integration of high
fidelity haptic feedback into human–robot interfaces, with
emphasis on the underlying dynamical nature of mechanical interaction.
In particular, our work covers virtual reality and teleoperation.
Virtual Reality
Virtual reality based medical simulation is very promising. By
introducing virtual reality techniques to endodontics, we have
developed an interactive virtual environment for endodontic simulation
with both visual and haptic feedback. The system is targeted for
facilitating endodontic training and reducing ethical concerns and
potential risks associated with traditional training approach. Our work
is focused on exploring methodologies for dynamic modeling, visual/haptic
display and model validation of endodontic shaping.
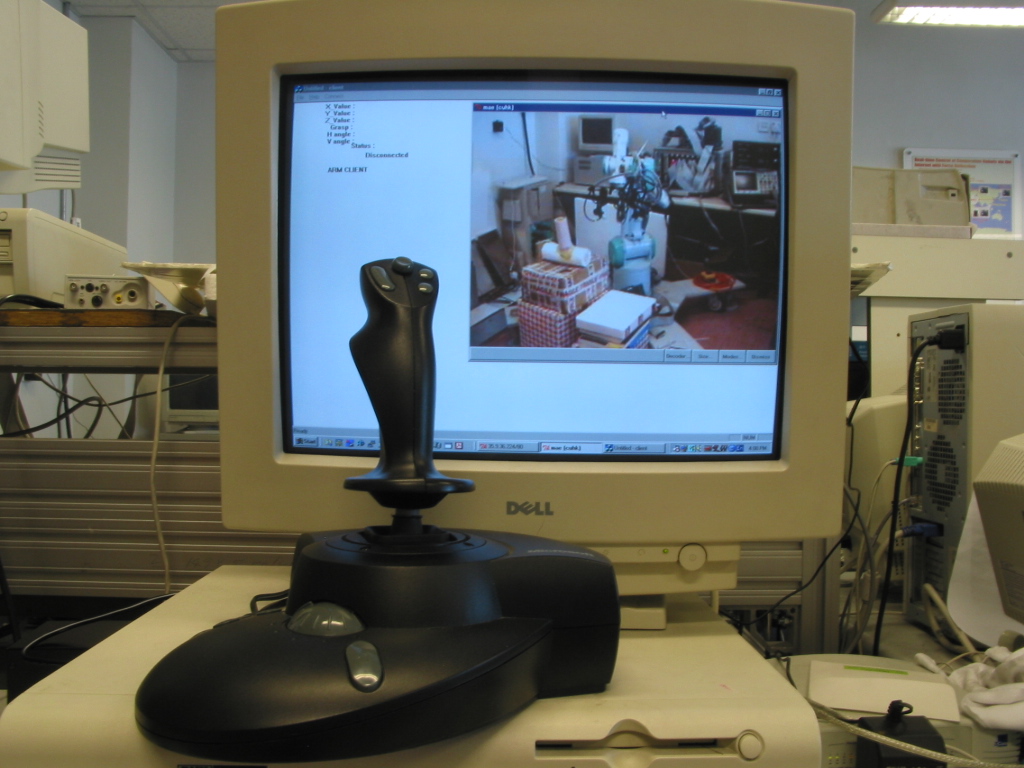
Teleoperation
With the rapid development of information
technology, the use of the Internet has been expanded to the field of
automation, i.e. using the Internet as a tool to control equipment
located at remote sites. We have developed a system that enables
multiple operators at different sites to cooperatively control multiple
robots with real-time force reflection via the Internet, which makes the
teleoperation easier and more natural.
Funding Sources:
Hong Kong RGC Grant 4199/04E
NSFC Project 60334010 and 60475029
Hong Kong RGC and NSFC Grants
CUHK4166/98E, N_CUHK404/01 and CUHK4173/00E
Chinese High-tech Program (863) Projects AA422250 and AA135220
People Involved:
Prof. Yun-Hui Liu, Dr. Min Li and Mr. Wang-Tai Lo
Publications:
Min Li and Yun-Hui Liu, “Dynamic Modeling and Experimental
Validation for Interactive Endodontic Simulation", to appear in IEEE
Transactions on Robotics.
Min Li and Yun-Hui Liu, “Learning Interaction Force Model for
Endodontic Shaping with Support Vector Regression”, Proceedings of
the IEEE International Conference on Robotics and Automation,
Orlando, USA, May 2006, pp. 3642-3647.
Min Li and Yun-Hui Liu, “Haptic Modeling and Experimental
Validation for Interactive Endodontic Simulation”, Proceedings of
the IEEE International Conference on Robotics and Automation,
Orlando, USA, May 2006, pp. 3292-3297.
Min Li and Yun-Hui Liu, “Modeling Interactions of Pulpal Tissue
with Deformable Tools in Endodontic Simulation”, Proceedings of the
IEEE International Conference on Robotics and Automation, Barcelona,
Spain, Apr. 2005, pp. 2648-2653.
Min Li and Yun-Hui Liu, “A Virtual Endodontics Testbed for
Training Root Canal Skills”, Proceedings of the IEEE International
Conference on Robotics and Automation, New Orleans, USA, Apr. 2004,
pp. 841-846.
W. T. Lo, Y. H. Liu, N. Xi, Y. Wang, and T. Fukuda, Cooperative teleoperation of
multi-robot systems with force reflection via the Internet, IEEE/ASME Trans. on
Mechatronics, vol. 9, no. 4, pp. 661-669, 2004.
Min Li and Yun-Hui Liu, “Level of Detail Control of a Virtual
Dental Training System”, Proceedings of the IEEE International
Conference on Robotics, Intelligent Systems and Signal Processing,
Changsha, Oct. 2003, pp. 284-289.
W.T. Lo, Y. H. Liu, J. Elhajj, N. Xi, Y. Shi, and Y. Wang, “Cooperative control
of internet based multi-robot systems with force reflection,” Proceedings of
IEEE Int. Conf. on Robotics and Automation, pp. 4414-4419, 2003.
A qualitative test for frictional form-closure grasps is developed
based on a ray-shooting problem, which is transferred to a Linear
Programming problem.
The grasp computation and optimization problem is formulated as
non-linear programming problems under friction cone constraints.
A complete and efficient algorithm is developed for searching 3D
form-closure grasps in discrete domain. It takes kinematic constraints
into account and is applicable to 3D curved objects.
An incremental method is developed for automatically selecting
eligible fixturing surfaces and calculation of optimal fixturing points
to minimize workpiece locating errors in fixture layout designs.
Funding Sources:
RGC Earmarked Grant (PI: Prof. Yun-Hui Liu): "3D grasp planning with applications to
automated fixture layout design", HK$826,105, 2001-2002.
RGC Earmarked Grant (PI: Prof. Yun-Hui Liu): "Mapping human hand motion to robotic
hands: learning and optimizing", HK$360,000, 1997-1998.
People Involved:
Prof. Yun-Hui Liu, Prof. Michael Yu Wang, Dr. Dan Ding and Miss Cherry Miu-Ling Lam
Publications:
Yun-Hui Liu, Miu-Ling Lam, and Dan Ding, A Complete and
Efficient Algorithm for Searching 3-D Form-Closure Grasps in the
Discrete Domain, IEEE Transactions on Robotics, Volume 20, Number 5,
pp. 805-816, October 2004.
Yun-Hui Liu, Dan Ding and Miu-Ling Lam, 3-D Grasp Analysis and
Synthesis Using the Ray-Shooting Technique, in Lecture Notes in
Control and Information Sciences, Springer-Verlag, Volume 299,
pp.80-109, 2004.
Yun-Hui Liu, “Optimal fixture layout design for 3-D workpieces,”
Proceedings of IEEE Int. Conf. on Robotics and Automation, vol. 5,
pp. 5274-5279, 2004.
Yun-Hui Liu, “Grasping planning of multi-fingered robot hands,”
Proc. of IEEE Int. Conf. on Intelligent Mechatronics and Automation,
pp. 350-355, 2004.
Yun-Hui Liu and Miu-Ling Lam, “Searching 3-D form-closure grasps
in discrete domain,” Proceedings of IEEE/RSJ Int. Conf. on
Intelligent Robots and Systems, pp. 27-31, 2003.
Yun-Hui Liu and Miu-Ling Lam, "Finding 3-D Frictional Grasps in
Discrete Domain", in Proceedings of the Chinese Intelligent
Automation Conference, pp.579-584, 2003.
Michael Yu Wang and Yun-Hui Liu, “Force passivity in fixturing
and grasping,” Proceedings of IEEE Int. Conf. on Robotics and
Automation, pp. 2236-2241, 2003.
Dan Ding, Guo-Liang Xiang, Yun-Hui Liu, and Michael Yu Wang,
“Fixture layout design for curved workpieces,” Proceedings of IEEE
Int. Conf. on Robotics and Automation, pp. 2906-2911, 2002.
Dan Ding, Yun-Hui Liu, Michael Yu Wang, Shu-Guo Wang, Automatic
selection of fixturing surfaces and fixturing points for polyhedral
workpieces, IEEE Transactions on Robotics and Automation, Vol. 17,
No. 6, pp. 833-841, 2001.
Dan Ding, Yun-Hui Liu, Shu-Guo Wang, Computation of 3D
form-closure grasps, IEEE Transactions on Robotics and Automation,
Vol. 17, No. 4, pp. 515-522, 2001.
Miu-Ling Lam, Dan Ding and Yun-Hui Liu, “Grasp planning with
kinematic constraints,” Proceedings of IEEE/RSJ Int. Conf. on
Intelligent Robots and Systems, Hawaii, November, 2001.
Dan Ding, Yun-Hui Liu, J. Zhang, and A. Knoll, “Computation of
fingertip positions for a form-closure grasp,” Proceedings of IEEE
Int. Conf. on Robotics and Automation, pp. 2217-2222, 2001.
Dan Ding, Yun-Hui Liu and Michael Yu Wang, “On computing
immobilizing grasps on 3D curved objects,” Proceedings of IEEE Int.
Conf. Computational Intelligence in Robots and Applications, Banff,
August, 2001.
Dan Ding, Yun-Hui Liu, and Michael Yu Wang, “Automatic selection
of fixturing surfaces and fixturing points of polyhedral workpieces,”
Proceedings of IEEE/RSJ Int. Conf. on Intelligent Robots and
Systems, Hawaii, November, 2001.
Dan Ding, Yun-Hui Liu, Shu-Guo Wang, The synthesis of 3D
form-closure grasps, Robotica, Vol. 18, No. 1, pp. 51-58, 2000,
Cambridge University Press.
Yun-Hui Liu, Computing n-finger form-closure grasps of polygonal
objects, Int. J. of Robotics Research, vol. 18, no. 2, pp. 149-158,
2000.
Dan Ding, Yun-Hui Liu, Yan-Tao Shen, and Guo-Liang Xiang, “An
efficient algorithm for computing a 3D form-closure grasps,”
Proceedings of IEEE Int. Conf. on Intelligent Robots and Systems,
vol. 2, pp. 1223-1228, 2000.
Dan Ding, Yun-Hui Liu, and Shu-Guo Wang, “The synthesis of 3D
form-closure grasp,” Proceedings of IEEE Int. Conf. on Robotics and
Automation, vol. 4, pp. 3579-3584, 2000.
Dan Ding, Yun-Hui Liu and Shu-Guo Wang, “Computing 3-D optimal
form-closure grasps,” Proceedings of IEEE Int. Conf. on Robotics and
Automation, vol. 4, pp. 3573-3578, 2000.
Yun-Hui Liu, Qualitative test and force optimization of 3D
frictional form-closure grasps using linear programming, IEEE
Transactions on Robotics and Automation, vol. 15, no. 1, pp.
163-173, 1999.
Yun-Hui Liu, Dan Ding, and Shu-Guo Wang, “Towards construction
of 3D frictional form-closure grasps: a formulation”, Proceedings of
IEEE/RSJ International Conference on Intelligent Robot and System,
pp. 279-284. Kyongju, South Korea, 1999.
Yun-Hui Liu, Dan Ding, and Shu-Guo Wang, “Constructing 3D
frictional form-closure grasps of polyhedral objects,” Proceedings
of IEEE Int. Conf. on Robotics and Automation, 1999.
Yun-Hui Liu and Michael Yu Wang, “Qualitative test and force
minimization of 3D frictional form-closure grasps using linear
programming, Proceedings of IEEE Int. Conf. on Robotics and
Automation, 1998.
Yun-Hui Liu, “Computing n-finger force-closure grasps on
polygonal objects,” Proceedings of IEEE Int. Conf. on Robotics and
Automation, 1998.
Muli-site, multi-opearator, and multi-robot systems based on the
Internet.
Real-time feedback of supermedia information, i.e. Multi-media
information plus haptic feedback.
Tasks synchronization based on a novel distributed event-based
method.
Interactive control of the robots, and real-time interactions
among the operators.
Applicable to tele-operation via commercial mobile communication
networks.
Funding Sources:
tbd
People Involved:
Prof. Yun-Hui Liu, Prof. Ning Xi, Prof. Yuechao Wang, Dr.
Wai-Keung Fung and
Mr. Wang-Tai Lo
Publications:
W. T. Lo, Y. H. Liu, N. Xi, Y. Wang, and T. Fukuda, Cooperative teleoperation of
multi-robot systems with force reflection via the Internet, IEEE/ASME Trans. on
Mechatronics, vol. 9, no. 4, pp. 661-669, 2004.
W. K. Fung, N. Xi, W. T. Lo, B. Song, Y. Shun, Y. H. Liu, and I. Elhajj, “Task
driven dynamic QoS based bandwidth allocation for real-time teleoperation via
the Internet,” Proceedings of IEEE/RSJ Int. Conf. on Intelligent Robots and
Systems, pp. 1094-1099, 2003.
I. Ehajj, N. Xi, W. K. Fung, Y. H. Liu, Y. Hasegawa, T. Fukuda, Supermedia
enhanced internet based telerobotics, IEEE Proceedings: special issue on
networked intelligent robots through the internet, vol. 91, no. 3, pp. 396-421,
2003.
I. Elhajj, N. Xi, W. J. Li and Y. H. Liu, “Supermedia-enhanced e-service
robots,” Proceedings of Int. Conf. on Robotics, Intelligent Systems, and Signal
Processing, pp. 662-667, 2003.
I. Ehajj, N. Xi, W. K. Fung, Y. H. Liu, T. Kaga, Y. Hasegawa and T. Fukuda,
Multi-site Internet-based tele-operation, Integrated Computer-Aided Engineering,
vol. 9, pp. 117-127, 2002.
I. Elhajj, N. Xi, B. Song, M. Yu, W. Lo, and Y. H. Liu, “M-transparency and
synchronization in supermedia enhanced internet-based teleoperation,”
Proceedings of IEEE Int. Conf. on Robotics and Automation, pp. 2713-2718, 2002.
W. F. Fung, X. Xi, W. Lo, and Y. H. Liu, “Improving efficiency of internet based
teleoperation using network QoS,” Proceedings of IEEE Int. Conf. on Robotics and
Automation, pp. 2707-2712, 2002.
We have been working on dynamic control of robotic systems since early
1990. Our aim is to design simple control algorithms with guaranteed
dynamic stability. We believe that the characteristics of the nonlinear
robot dynamics must be fully taken into account in the control design.
We have made important contributions in the following topics:
Decentralized adaptive hybrid position/force control of multi-robot
systems:. We proposed to use the joint-space orthogonalization principle
to decouple controllers for different robots and developed a class of
decentralized adaptive controllers with guaranteed dynamic stability.
Cooperative control of under-actuated multi-robot systems: We formulated the kinematics and dynamics of under-actuated cooperative
manipulators and developed a novel scheme for their position and
tracking control.
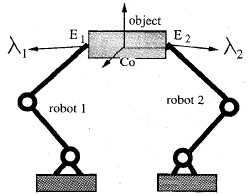
Multi-robot systems handling flexible objects: We are among the
earliest people who studied modeling and manipulation of flexible
objects using multiple manipulators. We developed an impedance
controller with guaranteed stability for two robot manipulators to handle
flexible beams and other deformable object.
Funding Sources:
CUHK Direct Grant (PI: Prof. Yun-Hui Liu): “Decentralized
control of multiple robotic systems”, HK$150,000, 1996.
CUHK Direct Grant (PI: Prof. Yun-Hui Liu): “Decentralized
adaptive force control of multiple robots in cooperation”,
HK$100,000, 1996/1997. (This is a fundable but funded RGC project.)
People Involved:
Prof. Yun-Hui Liu, Prof. Dong Sun, Prof. Yangsheng Xu and Prof.
Suguru Arimoto
Publications:
V. Parra-Vega, S. Arimoto, Y. H. Liu, G. Hirzinger and P. Akella, Dynamic
sliding PID control for tracking of robot manipulators: theory and experiments,
IEEE Trans. on Robotics and Automation, vol. 19, no. 6, pp. 967-976, 2003.
B. Xu, and Y. H. Liu, Delay-dependent/delay-independent stability of linear
systems with multiple time-varying delays, IEEE Trans. on Automatic Control,
vol. 19, no. 6, pp. 967-976, 2003.
D. Sun and Y. H. Liu, Position and force tracking of a two-manipulator system
manipulating a flexible beam, Journal of Robotic Systems, vol. 18, no. 4, pp.
197-212, 2001.
D. Sun and Y. H. Liu, “Position and force tracking of a two-manipulator system
manipulating a flexible beam payload,” Proceedings of IEEE Int. Conf. on
Robotics and Automation, pp. 3483-3488, 2001.
Y. H. Liu and D. Sun, Stabilizing A flexible beam handled by two manipulators
via PD feedback, IEEE Transactions on Automatic Control, vol. 45, no. 11, pp.
2159-2164, 2000.
Y. H. Liu, Y. S. Xu, and M. Bergerman, Cooperation control of multiple
manipulators with passive joints, IEEE Transactions on Robotics and Automation,
vol. 15, no. 2, pp. 258-267, 1999.
Y. H. Liu, Qualitative test and force optimization of 3D frictional form-closure
grasps using linear programming, IEEE Transactions on Robotics and Automation,
vol. 15, no. 1, pp. 163-173, 1999.
D. Sun, J. Mills and Y. H. Liu, Position control of multiple robots manipulating
a general flexible object, Int. Journal of Robotics Research, vol. 18, no. 3,
pp. 319-332, 1999.
D. Sun, J. K. Mills, and Y. H. Liu, “Hybrid position and force control of two
industrial robots manipulating a flexible sheet, theory and experiment,”
Proceedings of IEEE Int. Conf. on Robotics and Automation, pp. 1835-1840, 1998.
D. Sun, J. K. Mills, and Y. H. Liu, “Position control of multiple robots
manipulating a flexible payload,” Proceedings of American Control Conference,
pp. 456-460, 1998.
Y. H. Liu, K. Kitagaki, T. Ogasawara and S. Arimoto, Model-based adaptive hybrid
control for manipulators under multiple geometric constraints, IEEE Transactions
on Control Systems Technology, vol. 7, no. 1, pp. 97-109, 1999.
Y. H. Liu and S. Arimoto, Decentralized Adaptive and nonadaptive position/force
controllers for redundant manipulators in cooperation, International Journal of
Robotics Research, vol. 17, no.3, pp. 232-247, 1998.
Y. H. Liu and S. Arimoto, Adaptive and nonadaptive hybrid Ccontrollers for
rheo-holonomically constrained manipulators, Automatica, vol. 34, no. 4, pp.
483-491, 1998.
D. Sun and Y. H. Liu, Modeling and impedance control of a two-manipulator
systems a flexible beam, ASME Journal of System, Dynamics, Measurement, and
Control, vol. 119, pp. 736-742, 1997.
Y.H. Liu, S. Arimoto, V. Parra Vega, and K. Kitagaki, Decentralized adaptive
control of multiple manipulators in cooperations, International Journal of
Control, vol. 67, no. 5, pp. 649-673, 1997.
D. Sun, Z. Zhou, Y.H. Liu, and W. Shen, Development and application of
ultrasonic surgical instruments, IEEE Transactions on Biomedical Engineering,
vol. 44, no. 6, pp. 462-467, 1997.
Y.H. Liu and D. Sun, “Feedback stabilization of second order nonholonomic
systems to specific and meaningful states,” Proceedings of 2nd Asian Control
Conference, 1997. (invited session)
D. Sun, Y. H. Liu, and J. K. Mills, “Cooperative control of a two-manipulator
system handling a general flexible object,” Proceedings of IEEE/RSJ Int. Conf.
on Intelligent Systems and Robots, pp. 5-10, 1997.
D. Sun and Y.H. Liu, “Modeling and impedance control of a two manipulator
handling a flexible beam,” Proceedings of IEEE International Conference on
Robotics and Automation, 1997.
Y.H. Liu and Y. Xu, “Cooperation of multiple manipulators with passive joints,”
Proceedings of IEEE International Conference on Robotics and Automation, 1997.
Y. H. Liu and S. Arimoto, Distributively controlling two robots handling an
object in the task space without any communication, IEEE Transactions on
Automatic Control, vol. 41, no. 8, pp. 1193-1198, 1996.
D. Sun, X. Shi, and Y.H. Liu, Adaptive learning control for cooperation of two
robots manipulating a rigid object with model uncertainties, Robotica, vol. 14,
pp. 365 373, 1996.
K. Kitagaki, T. Suehiro, T. Ogasawara, and Y.H. Liu, Sensor based parallel
processing manipulation system: TAKUMI, the Journal of Robotics Society of
Japan, vol. 15, no. 3, pp. 363-372, 1996.
Y.H. Liu, V. Parra Vega, and S. Arimoto, “Decentralized cooperation control:
joint space approaches for holonomic cooperation,” Proceedings of IEEE Conf. on
Robotics and Automation, 1996.
D. Sun, X. Shi, and Y.H. Liu, “Modeling and cooperation of two arm robotic
systems manipulating a deformable object,” Proceedings of IEEE International
Conference on Robotics and Automation, pp. 2346-2351, 1996.
Y.H. Liu and S. Arimoto, “Implicit and explicit force controllers for
rheoholonomically constrained manipulators and their extensions to distributed
cooperation control,” Proceedings of the IFAC World Congress, vol. A, pp. 1-6,
1996. (invited paper).
Y.H. Liu, S. Arimoto, and T. Ogasawara, “Decentralized cooperation control:
noncommunication object handling,” Proceedings of IEEE International Conference
on Robotics and Automation, pp. 2414-2419, 1996.
Y. H. Liu and S. Arimoto, Finding the shortest paths of discs among polygonal
obstacles using a radius-independent graph. IEEE Transactions on Robotics and
Automation, vol. 10, no. 5, pp. 682-691, 1995.
Y. H. Liu and H. Onda, Constructing an approximate representation of a
configuration space without using any intersection check. SICE Transactions on
Instrument and Control Engineering, vol. 31, no.1, pp. 90-97, 1995.
T. Naniwa, S. Arimoto, L. L. Whitcomb, and Y. H. Liu, Model-based adaptive
control for geometrically constrained manipulators. SICE Transactions on
Instrument and Control Engineering, vol. 31, no.1, pp. 22-30, 1995.
S. Arimoto, T. Naniwa and Y. H. Liu, Model-based adaptive hybrid control for
manipulator with geometric endpoint constraint, Journal of Advanced Robotics,
vol. 9, no. 1, pp. 67-80, 1995.
Y. H. Liu and S. Arimoto, Computation of tangent graph of polygonal obstacles by
moving-line processing. IEEE Transactions on Robotics and Automation, vol.9, no.
6, pp. 823-830, 1994.
Y. H. Liu and S. Arimoto, A deadlock-free algorithm for planning a
collision-free coordinated motion for two mobile robots amidst unknown
environments. Journal of Advanced Robotics, vol. 7, no.5, pp. 507-522, 1993.
Y. H. Liu and S. Arimoto, Path planning using tangent graph for robots among
polygonal and curved obstacles. International Journal of Robotics Research, no.
4, pp.376-382, 1992.
Y. H. Liu and S. Arimoto, Motion planning based on local information for two
mobile robots amidst unknown environments. Journal of Robotics Society of Japan,
vol. 10, no. 2, pp.78-87, 1992.
Y. H. Liu, H. Noborio and S. Arimoto, A new solid model HSM and its application
to interference detection between moving objects. Journal of Robotics Systems,
vol. 8, no. 1, pp. 39-54, 1991.
Y. H. Liu and S. Arimoto, A new approach for path planning of mobile robots
among obstacles with general boundary. Journal of the Robotics Society of Japan,
vol. 9, no. 2, pp. 56-63, 1991.
Y. H. Liu, H. Noborio and S. Arimoto, A new solid model for checking an
interference between moving robots. Journal of the Robotics Society of Japan,
vol. 7, no. 5, pp. 26-34, 1989.
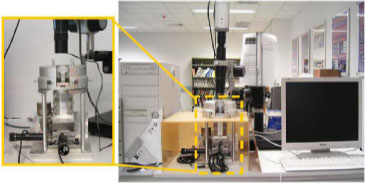
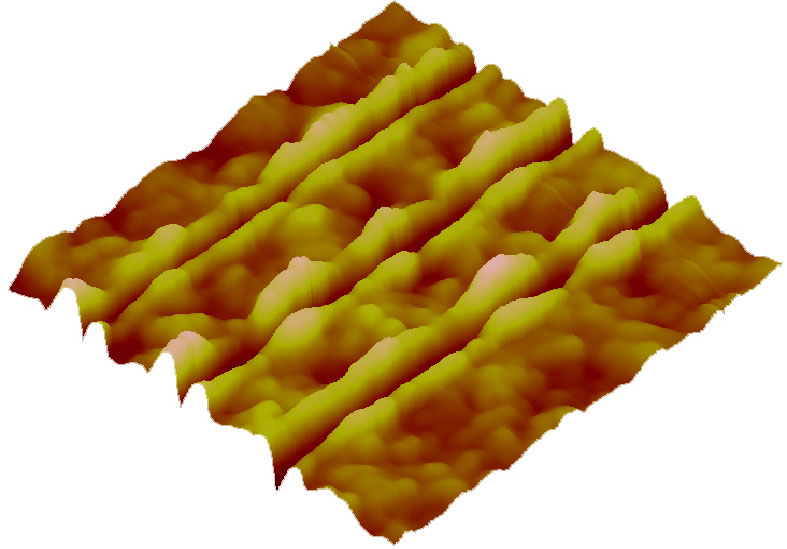
In this project, we aim to develop a nanomanipulation
system using atomic force microscopy, which provides real-time 3-D
stereoscopic video feedback and 3-D force feedback to operators. With
the 3-D stereoscopic visual feedback, the operator will have "immersive" experience, which
realizes his/her virtual presence in the nano-world. The immersive
feeling can greatly help the operator better understand and explore the
nano-environment so that the manipulation is easier and more effective.
By the 3-D force feedback, the operator is able to feel, in real-time,
interactions between the AFM tip and nano-objects.
The key technologies
to be developed are (1 )an augmented reality engine for synthesis of
real-time visual and force feedbacks based on sensor information and
molecular dynamic simulati`ons so as to avoid blind exploration, (2)
3-D immersive environment for stereoscopically visualizing the nano-world,
and (3) a new hand-held haptic device that allows operator to specify 3D
motion of the AFM tip and provides 3D force feedback.
Funding Sources:
RGC Earmarked Grant (PI: Prof. Yun-Hui Liu): “3D stereoscopic
augmented reality system for nano-manipulation and nano-experimentation
using AFM”, HK$506,447, 2004/2005.
People Involved:
Prof. Yun-Hui Liu, Ms. Crystal Lo-Ming Fok and Prof. Wen J. Li
Publications::
L. M. Fok, K. M. Fung, Y. H. Liu, and Wen J. Li, Testing of MEMS
Structure by Atomic Force Microscope, 2006 IEEE International Conference on
Nano/Micro Engineered and Molecular Systems (IEEE-NEMS 2006), Zhuhai, China,
Jan 18-21, 2006.
L. M. Fok, Y. H. Liu, and W. J. Li, Modeling of haptic sensing of
nanolithography with an atomic force microscopy, Proc. of IEEE Int. Conf. on
Robotics and Automation, pp. 2457-2462, 2005.
L. M. Fok, Y. H. Liu and Wen J. Li, "Haptic Sensing and
Modelling of Nanomanipulation with an AFM Tip", IEEE Int. Conf. on
Robotics and Biomimetics (ROBIO) 2004, Shenyang, China, August
22-26, 2004.
L. M. Fok, Carmen K. M. Fung, Y. H. Liu, and Wen J. Li,
“Nano-scale Mechanical Test of MEMS Structures by Atomic Force
Microscope by Atomic Force Microscope”, 5th World Congress on
Intelligent Control and Automation, June, Hangzhou, China.
L. M. Fok, Carmen K. M. Fung, Y. H. Liu, and Wen J. Li, "Nano-mechanical
Test of CNT-Embedded MEMS Structures by AFM", submitted, IEEE
Nanoscale Devices and System Integration, Miami, Florida, USA, Feb
15-19, 2004.