|
Practical
output regulation for nonlinear systems
|
|
The nonlinear output
regulation problem (also known as servomechanism problem) aims to
achieve asymptotic tracking with disturbance rejection in nonlinear
systems via feedback control. Research on this topic has led to a
powerful nonlinear control methodology that can handle a large class
of nonlinear systems. Solvability of this problem has been well
understood. The practical computation of the control law, however,
has not been well addressed due to the reliance of the control law
on the solution of a set of mixed nonlinear partial differential and
algebraic equations known as the regulator equations. The objectives
of this project are |
|
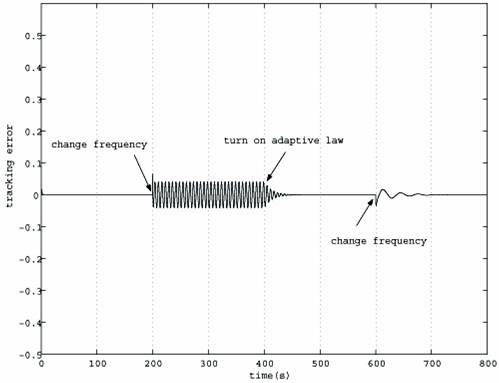
1. to obtain the
approximate solution of the regulator equations up to an arbitrary
accuracy based on a class of feedforward networks; and
2. to establish a control
strategy that can solve the nonlinear output regulation problem
approximately and practically.
|
 |
|
|
Nonlinear
Control Based on Energy |
|
 |
This projects aims to develop energy
based nonlinear control approaches with applications to
modern power systems. This project is affiliated with The
Institute of Systems Science, Chinese Academy of Science.
The project is a subproject of one of The national-973-Plan
projects "The Vital Research on Collapse Prevention and
Optimal Operation of Modern Power Systems" which is
affiliated with Tsinghua University. |
|
|
|
Computational
Approach to Synthesizing Nonlinear Control Laws |
|
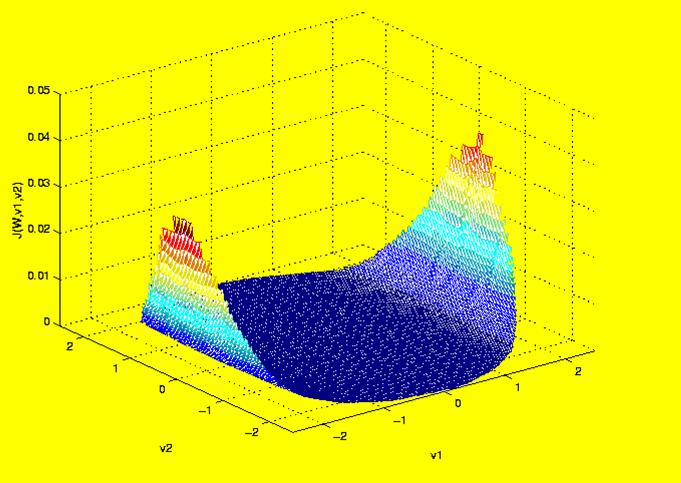
Synthesis of modern
nonlinear control laws typically involves solving complex
nonlinear algebraic or differential equations. For example,
the nonlinear H-infinity control law is expressed in terms
of the solution of the Hamilton-Jacobi-Isaacs (HJI)
equation. Due to the nonlinear nature, such equations
usually do not admit closed-form solution. This project aims
to develop an efficient algorithm and data structure that
leads to efficient approximation of the nonlinear H-infinity
control law. This project is supported by the Hong Kong
Research Grants Council (1997 - 1999).
|
 |
¡¡ |
|
Neural
Networks and Intelligent Computation |
|
|
Neural networks can be
used to emulate dynamic systems to facilitate both analysis
and simulation. The well known universal approximation theorem
enables a neural network to learn the behaviors of a dynamic
system through training the input-output relations of the
systems. This project will exploit the capability of the
neural networks to design control systems for high performance
vehicles, precision machines, etc.
|

|
|
|
Nonlinear
Dynamics |
|
|
Nonlinear phenomena
such as bifurcation and chaos as well as their applications to
engine systems and flight vehicles will be investigated. Also,
stabilization of nonlinear systems using differential
geometric control theory will be studied.
|
|
|
|
Robust
Control of Uncertain Nonlinear Systems |
|
|

|
This project, supported by
the Hong Kong Research Grants Council (1996 - 1998), aims to
tackle a long-standing open problem in nonlinear control that
involves finding a control law capable of achieving asymptotic
tracking and disturbance rejection in uncertain nonminimum
phase nonlinear systems. The success of this research may lead
to an effective approach to controlling highly uncertain
nonlinear systems such as high performance missile and/or
aircraft systems, high accuracy robot manipulators, and large
maneuvering spacecraft.
|
|
|
Internet-Based
Control |
|
|
This research is
aimed to build a web-based real time control system that can
be access anytime, anywhere via the Internet. By conducting
with the world wide web interface, experiments can be
performed as a concept of distance remote control. The
core of the research is to provide a server side communicating
with the experiment instruments, such as a robot arm, to allow
an interactive control carried out by the client side with the
interchange of data. Users monitoring and network security are
also the factors to be concerned. Increased
flexibility, interaction and controllability are the main
benefits from this idea. Resources are also greatly saved from
this Internet based approach due to nowadays' widely exploding
networking development.
|

|
|